






开发者说|Aux-Think:为什么测试时推理反而让机器人「误入歧途」?
2025/07/03

• 论文题目:
Aux-Think: Exploring Reasoning Strategies for Data-Efficient Vision-Language Navigation
• 论文链接:
https://arxiv.org/abs/2505.11886
• 项目主页:
https://horizonrobotics.github.io/robot_lab/aux-think/
视觉语言导航 (VLN) 的推理策略
在视觉语言导航 (VLN) 任务中,机器人需要根据自然语言指令在复杂环境中做出实时决策。虽然推理在许多任务中已有广泛应用,但在VLN任务中,推理的作用一直未被充分探讨。我们是第一个系统性研究推理策略对VLN任务影响的团队,发现现有的推理策略 (Pre-Think和Post-Think) 在测试阶段反而导致了较差的表现,让机器人导航失败。与此不同的是,我们提出的Aux-Think框架通过创新设计有效解决了这一问题。
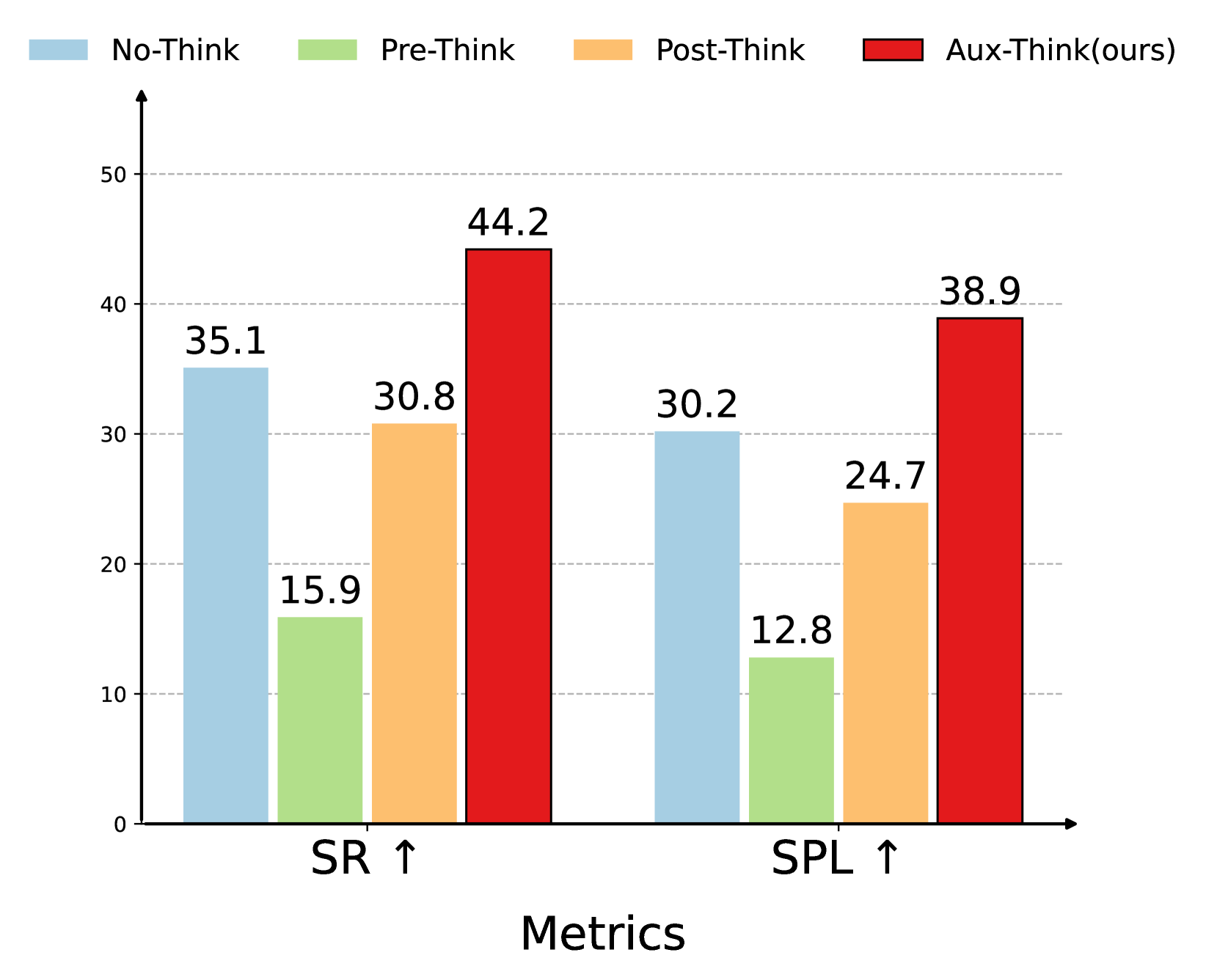
Aux-Think优于Pre-Think和Post-Think其它推理策略
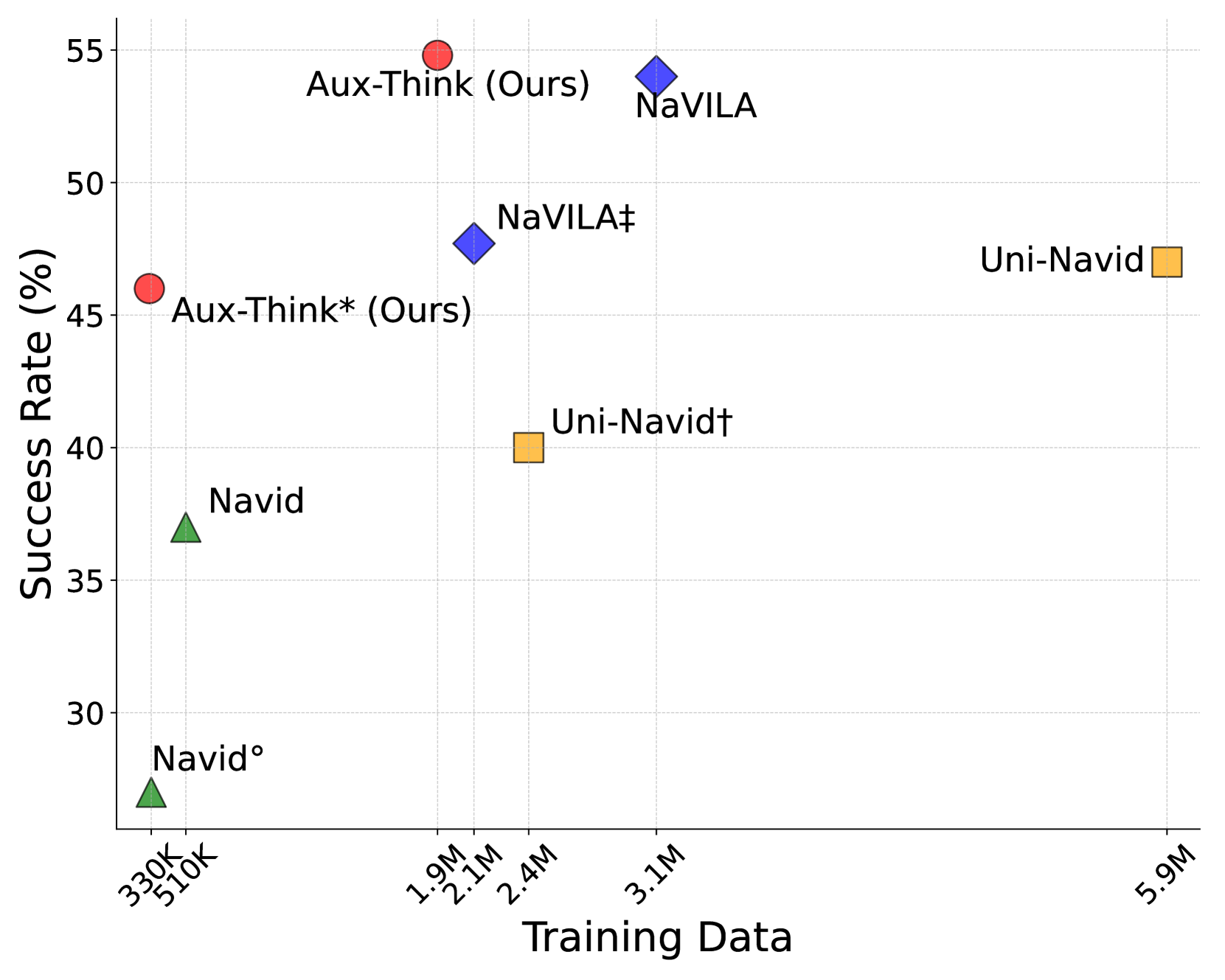
Aux-Think在数据效率与成功率之间达到帕累托最优
测试阶段推理的挑战
想象一名司机在开车时不断分析路况,并频繁回顾交通规则后才做决策。虽然这有助于理解环境,但当遇到陌生或复杂情况时,这种“思考过度”的方式反而容易因推理偏差而判断失误。
在视觉语言导航任务中,推理就像回顾交通规则,决策则对应真实的驾驶操作。推理本意是为了帮助机器人理解任务,但一旦进入训练中未见过的状态,思维链便可能产生幻觉。尤其是在不熟悉的环境中,过度依赖推理不仅无法提升决策,反而干扰行动、累积误差,最终导致机器人“误入歧途”。这种“推理崩塌”现象正是Aux-Think希望解决的关键问题。
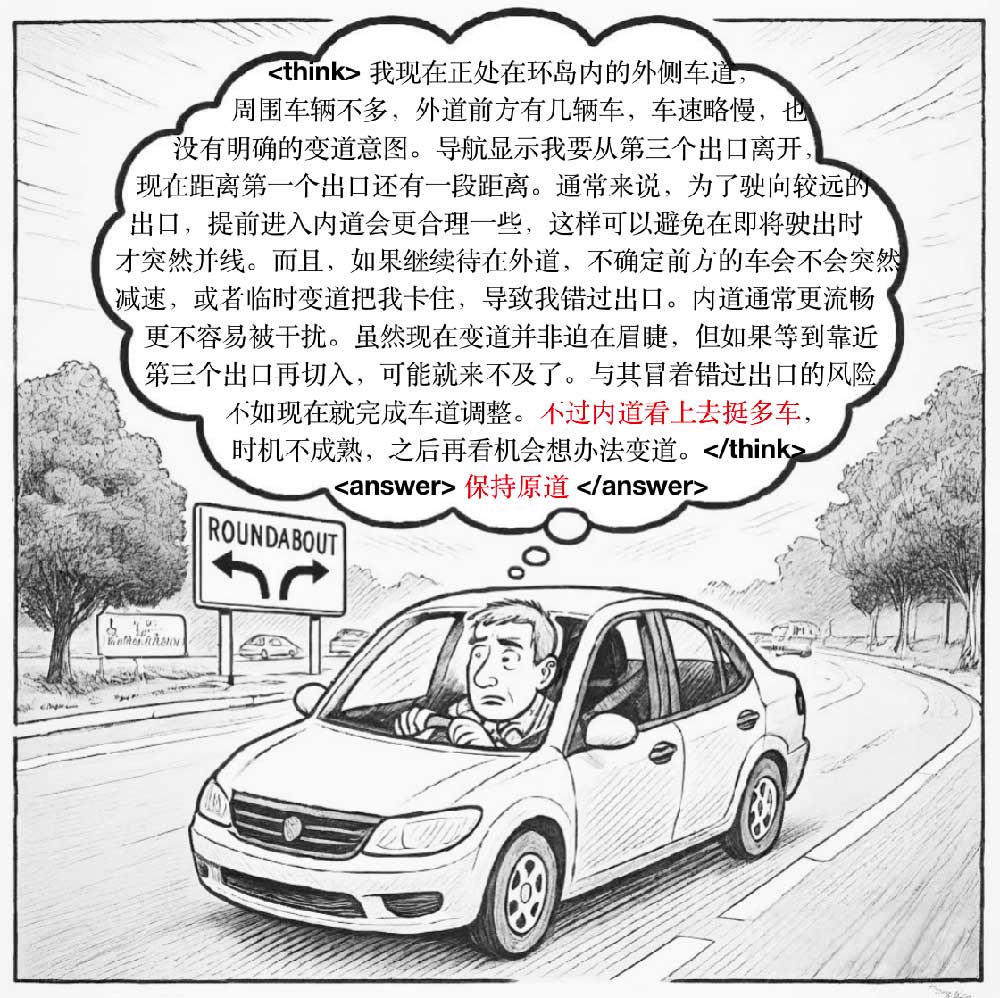
长推理链的少量错误(标红),反而导致决策错误
Aux-Think给出的新答案
为了应对上述问题,我们提出了Aux-Think,一种全新的推理训练框架。Aux-Think的核心思想是:在训练阶段通过推理指导模型的学习,而在测试阶段,机器人直接依赖训练过程中学到的知识进行决策,不再进行推理生成。具体来说,Aux-Think将推理和行动分开进行:
训练阶段:通过引导模型学习推理任务,帮助其内化推理模式。
测试阶段:直接根据训练中学到的决策知识进行行动预测,不再进行额外的推理生成。
这种设计有效避免了测试阶段推理带来的错误和不稳定性,确保机器人能更加专注于执行任务,减少了推理过程中可能引入的负面影响。
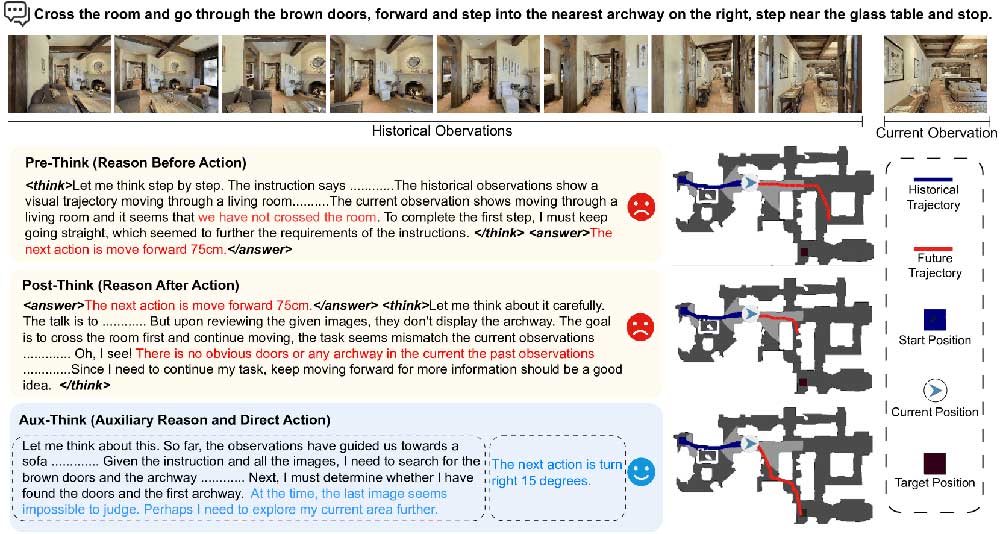
上图中展示的是一个导航任务:“穿过房间,走到右侧的拱门并停在玻璃桌旁”。三种策略面对相同场景做出了不同反应:Pre-Think模型在行动前试图推理整条路径,认为应该“前进75cm”,但忽视了当前观察并未穿过房间,导致偏离目标;Post-Think模型在执行动作后才分析环境,发现没有看到拱门,但错误已发生,只能继续试探,继续偏航;Aux-Think则在训练时学习推理逻辑,测试时直接基于当前观察判断“右转15度”,准确识别拱门位置,成功完成导航任务。
实验结果
大量实验表明,Aux-Think在数据效率与导航表现方面优于当前领先方法。尽管训练数据较少,Aux-Think仍在多个VLN基准上取得了单目 (Monocular) 方法中的最高成功率。通过仅在训练阶段内化推理能力,Aux-Think有效缓解了测试阶段的推理幻觉与错误传播,在动态、长程导航任务中展现出更强的泛化能力与稳定性。
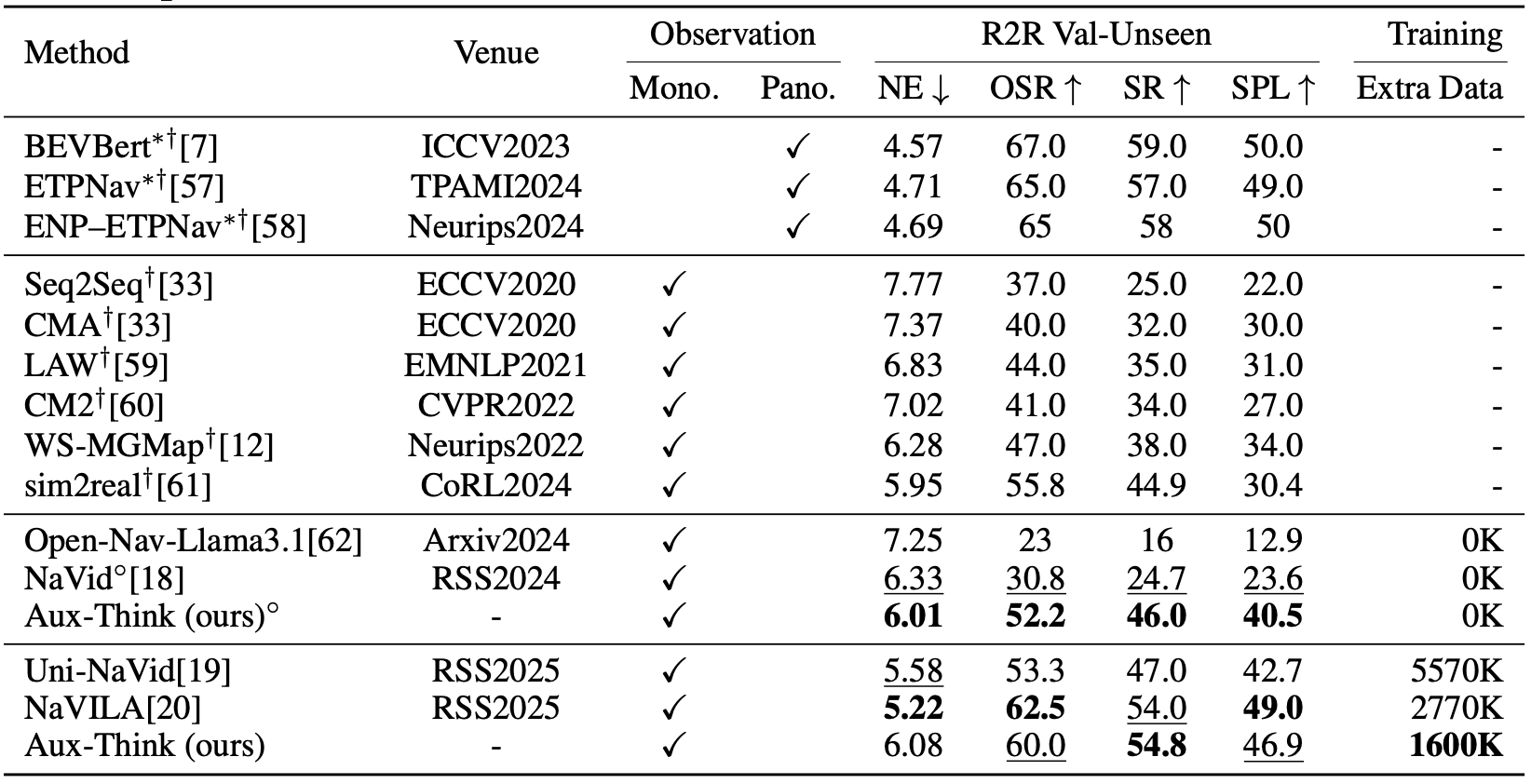
R2R-CE上的指标:Aux-Think在视觉语言导航任务的R2R验证集 (Val-Unseen) 上取得领先的成功率 (SR) ,即使使用的训练数据更少,也能超越多种现有方法。
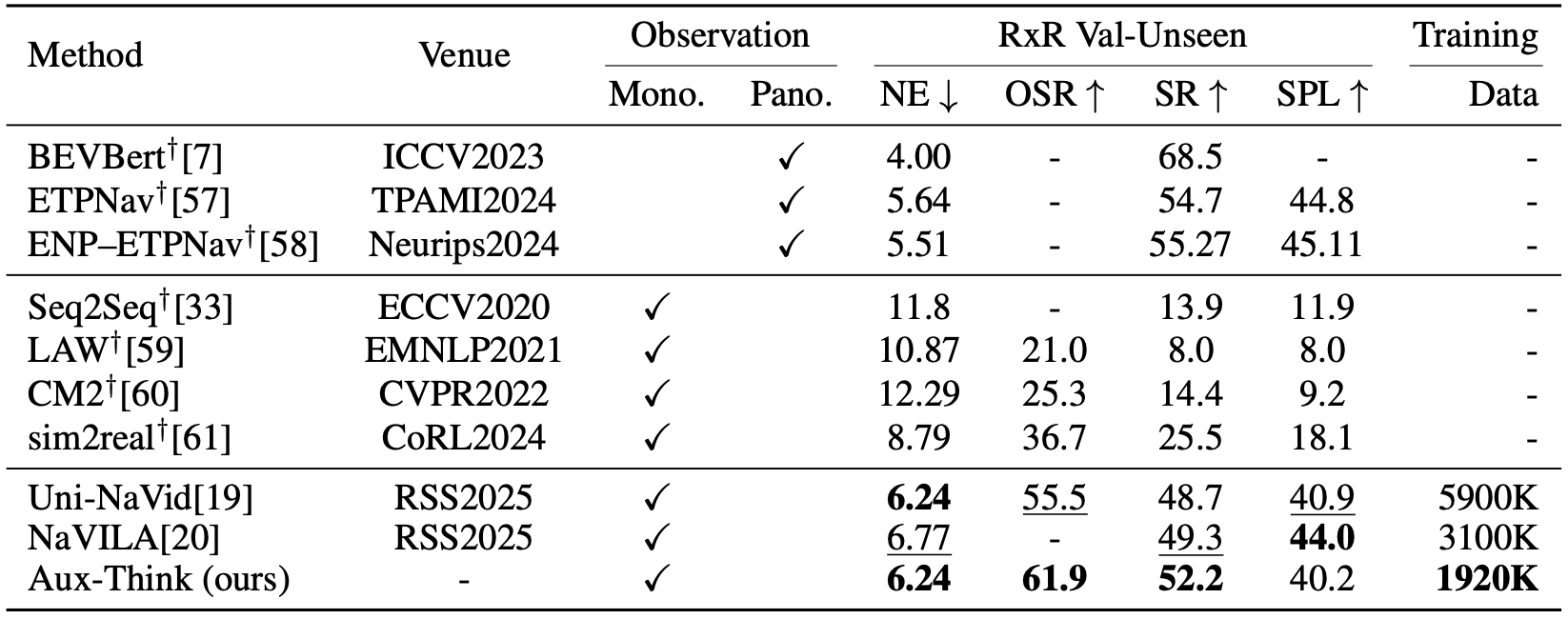
RxR-CE上的指标:RxR比R2R更大、更复杂,Aux-Think在RxR验证集上依然以更少数据实现更高成功率 (SR) ,展现出优越的泛化能力。
总结与展望
Aux-Think为解决测试阶段推理引发的导航问题提供了新的思路。通过在训练阶段引入推理指导,在测试阶段去除推理负担,Aux-Think能够让机器人更加专注于任务执行,从而提高其导航稳定性和准确性。这一突破性进展将为机器人在实际应用中的表现奠定更为坚实的基础,也为具身推理策略提供了重要启示。

分享文章






欢迎订阅地平线相关资讯,您可以随时取消订阅。

感谢您的订阅, 我们会第一时间推送地平线最新活动与资讯到您邮箱


